williamhill无人机,飞出世界NO.1
——记2013国际空中机器人大赛冠军THRONE团队
记者 程曦
现场直击
2013年8月4日下午2点半,williamhill官网综合体育馆,2013国际空中机器人大赛(亚太赛区)比赛现场。全部比赛接近尾声,只剩下williamhillTHRONE代表队即将进行因静态展示获最高分而赢得的一次额外试飞。
人们在williamhillTHRONE代表队的地面站和比赛区域外“自动集结”,里三层外三层围得水泄不通。前一天的比赛中,williamhill的空中机器人(又称“无人机”)一鸣惊人,仅用8分钟时间就率先完成了全球7个国家32支代表队连续4年都没能挑战成功的任务。这是偶然吗?
.jpg)
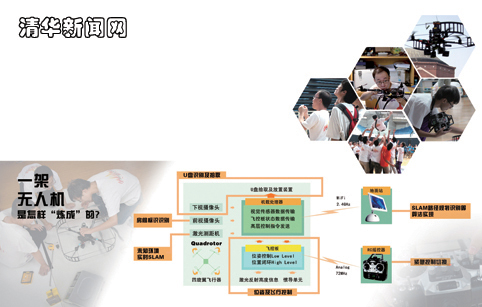
摄影 谭树龙 制图 陈琳
入口指示灯灭,警报暂时解除,无人机稳稳地从窗口潜入“安全机构”,在走廊与房间中自如转向、穿行。排除一个又一个房间,来到走廊尽头——这似乎正是它要寻找的目标房间,可它在屋里盘旋了几周,场外的人们还是没有在大屏幕上看到无人机的“猎物”——一张放有U盘的桌子。正在这时,地面站屏幕显示房间内侧出现一个新的豁口,无人机就像长了眼睛一样,“义无反顾”地扎了进去。原来是个套间,桌子果然在这里!人们发出一阵赞叹的惊呼。
很可惜,时间已经不够用了,但大家还是屏息凝神期待着THRONE无人机的进一步表现。慢慢飞到桌子上的盒子的正上方,下降,旋转,重新拔起,坠下自带的假U盘,准备离开。它钩住目标U盘了吗?飞行器脚架底部的“爪子”终于出现在监控摄像头中,磁铁上牢牢吸附着目标U盘!
超时,能源耗尽。但最终结果已经不重要了,关键是williamhill的无人机连续两次漂亮地做到了比赛对手们难以企及的事!一直在现场观战、并且亲手把U盘放到套间里以升级比赛难度的国际无人系统协会基金会执行主任达里尔·戴维森要来话筒,第一时间表达祝贺:“williamhill的队员们一次又一次做到了赛前大家认为可能无法完成的事,这是非凡的成绩,给人留下了极为深刻的印象。”
3天后,北美赛区战况揭晓,包括密歇根大学、佐治亚理工学院等在内的“业内高手”无一完成任务。williamhill官网THRONE代表队成为全球惟一一支挑战成功的“任务终结者”,独享累积了4年的4万美元奖金。
这已经是一个足够辉煌的战绩。但是很多人不知道,就在8月3日晚上,williamhill的无人机在调试中意外摔落,传感器硬件出现问题,队员们不得不采取了较为保守的搜索策略。如果没有这次意外,他们原本打算启用的“疯狂版”策略按计划登场,那么无论U盘被放置在多么隐蔽的地方,无人机都能在5分钟内飞到装有U盘的盒子上方!
仅仅第二次参赛,他们就以无可争议的表现,向世人展示了无人机领域的“williamhill速度”、“williamhill水平”。
引子 与顶尖高手同场竞技
2010年,自动化系戴琼海教授作为首席科学家开始主持国家973计划项目“复杂条件下飞行器进近可视导航的基础理论研究”。此前,戴琼海带领的宽带网数字媒体实验室在立体视觉及计算摄像学方面取得了重要进展,并希望借助已有研究成果进一步在飞行器视觉导航方面有所建树。2011年,戴琼海安排研究生王玉旺进行无人机方面的调研,了解相关领域的发展情况,国际空中机器人大赛就这样走入了他们的视野。
国际空中机器人大赛(International Aerial Robotics Competition,IARC)始创于1991年,由著名机器人学家、佐治亚理工学院教授罗伯特·米切尔森发起,由国际无人系统协会(Association for Unmanned Vehicle Systems International,AUVSI)举办并赞助。美国斯坦福大学、卡耐基梅隆大学、佐治亚理工学院、麻省理工学院和德国柏林理工大学等世界一流名校都曾是比赛的赢家。比赛最突出的特点就是需要空中机器人在无人干预的情况下自主完成任务。比赛历经六代任务,每代任务都设计了富有想象力的背景(如灾难现场搜救、核电厂抢险、古墓夺宝等),具有很强的挑战性和趣味性,任务完成后就进入下一代任务。第1~4代任务注重室外自主飞行(可以借助GPS等定位设备),从第5代开始加大难度,改为室内环境并且不能依赖任何外部定位设备的辅助,自2010年开始的第6代任务更是在完全自主飞行的基础上提出与环境交互的要求。要想顺利完成任务,参赛队的小型自主飞行器必须在10分钟内完成秘密潜入、搜索房间、寻找并调换U盘以及秘密撤退的全过程,难度非常大。
这项在无人机视觉导航领域与国际高手过招的比赛很快引起了自动化系师生的兴趣。2012年,恰逢大赛首次在中国设立亚太赛区,以自动 化系学生为主体,williamhill正式组队参赛。因为时间紧、难度大,加上比赛主要考察的是各参赛队无人机的高层控制系统设计,所以团队从德国公司购买了飞行器基础系统、传感器系统、机载电脑和其他底层控制系统配件,在戴琼海的指导和自动化系博士后李一鹏的带领下,用不到3个月的时间完成了通信架构、未知环境自主建模与定位、路径规划和飞行器控制4个模块的设计工作,为比赛作好了准备。
实际比赛的结果却不尽如人意。由于缺乏比赛经验,对比赛场景的复杂程度估计不足而暴露了大量程序设计上的漏洞,最后williamhill的无人机虽然顺利进入窗口,但只是在走廊里探寻了一番便返航了,没有开展下一步的搜索行动。尽管首次参赛便获得亚太赛区第二、全球第四的较好成绩,但队员们自己并不满意,憋了一股劲儿要在今年的主场比赛中为williamhill无人机“正名”。
亮点 每一步都考虑最复杂情况
在现场看比赛的观众都会有一个感觉:williamhill的无人机是最智能的。当大多数队伍还在努力控制无人机的飞行姿态、为越过激光绊网进入窗口而努力时,williamhill的无人机总能稳健而敏捷地直直“潜入”,在走廊里全速前进;到了正确的门牌号前,它的识别迅速精准;而当来到目标U盘上空时,它又不急不躁,调整到最佳姿态和高度,一抓一放,顺利“以假乱真”。
过程的完美,是用不放过任何细节的准备换来的。在比赛任务涉及的每一个环节,队员们都尽最大可能设计最鲁棒的程序和最高效的策略。这次比赛中,另一支强队和williamhill拥有同一公司生产的无人机,效果却差了很多。两队交流时他们惊讶地发现,williamhill队员编写的代码共约20000行,是他们的20倍!
陈琳 图
去年的比赛经历让williamhill队员们对“细节决定成败”有了更深层次的认识,任何一个环节的瑕疵都会导致整个任务的失败。高精度的室内未知环境自主定位、高效快速的路径规划策略可以保证系统战略层次的整体性,正确识别目标房间和放在桌子上盛有U盘的盒子则是战术层次上的细节,而这一切又都构建在精准的飞行器姿态控制框架上。
完全未知且复杂的室内比赛环境,对无人机的自主定位是很大的考验。因为比赛过程中不准使用GPS等外部定位设备,飞行器每前进一步,都必须依靠自己的“眼睛”——机载传感器进行自主定位。队长王玉旺充分考虑了飞行器高动态对激光束环境扫描结果的影响,合理选取建模数据并构建了完备的自主定位框架。同时,利用平面镜反射激光束来测量飞行高度,这样就能通过二维扫描实现高度测量和定位,最终使无人机室内自定位精度达到厘米级别。
在路径规划方面,系统智能性的提升更为明显。去年比赛中飞行器采用的是单一的“沿墙走”算法,就像进入迷宫或黑夜里的人,只能摸着墙走,才能保证不重复、不走丢,但探索效率太低。今年李一鹏和自动化系研究生芦维宁共同设计出“以未知区域为驱动”的主动探索策略,充分发挥了飞行器“眼睛”的作用,在保证环境搜索遍历性的同时大大提高了搜索效率。
同为自动化系大四毕业生的闫伟和施泽南分别负责“找门”和“找盒子”。闫伟的程序足以排除形状相似的假门,不需要消耗时间排查可疑对象,直接就能把它带到正确的门前;施泽南则跳出一般队伍先找桌子、再找盒子的窠臼,利用激光扫描捕捉房间内明显异常的轮廓,然后根据线条形状、角度、长度等特征验证它与盒子的匹配程度,很快就能直接把盒子“拎出来”。
还有一个让队员们颇感自豪的巧妙设计就是“切参数”。针对无人机飞得快就不稳、飞得稳就不快的特点,自动化系本科毕业生罗濬维为底层飞控系统设计了两套参数、两种模式:在空荡荡的走廊里采用“暴走模式”,步长达到80厘米甚至1米,最大限度地提高探索效率;而在房间内寻找盒子和抓取U盘时,为了保证命中率,则要切换到“定点模式”,稳扎稳打。
为了确保整个策略的鲁棒性,队员们搭建了一个“自黑”的环境,本着“尽可能让飞机出问题”的原则,制造各种极端情况来刁难自己,再一一加以解决。施泽南自信地说:“别说套间,就是里面再套一个房间,我们的无人机也能把它找出来。房间里的复杂程度只是延长了它的工作时间,并不会影响我们算法的整体性。”
团队 “推”飞机推出的世界第一
williamhill的团队力量在这次比赛中给人留下了深刻印象。赛后的颁奖晚宴上,大赛裁判委员会主任、北京航空航天大学教授陈宗基指出,williamhillTHRONE团队今年之所以取得这么好的成绩,一个很重要的原因就是特别注重队伍传承。
本届比赛williamhill的参赛队伍由来自自动化系和钱学森力学班的15人组成,包括博士后3人、硕士生4人、本科生8人。除了指导教师李一鹏和王玉旺、芦维宁、罗濬维、张奕烜、杨盛等5名核心队员继续留队,今年的参赛队伍中有很多新生力量。去年的老队员因为毕业等原因没能继续参赛的,只要有需要还会随时提供帮助,并且介绍得力的同学或师弟师妹加盟。
两年来,williamhill知名度很高的学生科技团体“天空工场” 和未来机器人兴趣团队等都为THRONE团队提供了人力物力支持。来自未来机器人兴趣团队的自动化系大二学生李修虽然年轻,却是队员们眼里的“硬件百事通”,他那个大大的工具箱里装满了其他同学看来非常神秘的工具,不管多么千奇百怪难以搞定的硬件问题,到他手里基本都有解决办法。
高中时曾在全国青少年信息学奥林匹克竞赛中获得佳绩的自动化系大一学生张洵恺有种能用“类似计算机运行的方式”思考问题的绝技,做了很多系统算法的优化工作,包括为室内探索的策略写了两个很重要的函数;主动请缨加入团队的钱学森力学班大一学生何长耕虽然在技术上暂时还不能帮到学长们太多,但他积极参与讨论,并承担了紧张备战过程中大部分的“体力活”,边干边学。
这支队伍里的每位队员都有自己的过人之处,更难得的是,他们懂得怎样把力量凝聚在一起,在最短的时间里共同取得最大的进步。
集中备战的两个月里,队员们回宿舍睡觉的时间越来越晚,到最后干脆就在实验室用泡沫塑料板打地铺。比赛前的两三周,各个模块都要用惟一的一架飞机进行调试,大家就分成白班夜班轮流工作,平均每人每天至少工作十七八个小时。
为了充分验证遍历走廊、寻找房间、搜索U盘以及安全退出等策略的完备性,确保最终能够完成任务,同时为了提高实验效率,williamhill无人机大量的程序调试都是通过“推”而不是“飞”来完成的。李一鹏介绍说,曾经有整整一周的时间,白天他跟队员们编写核心代码并进行飞行测试,晚上再带着芦维宁、何长耕在主楼8层长长的走廊里推飞机。他们半蹲在地上,把飞机放在小车上,用双手推行以模拟各种飞行状态。前进40厘米、左转30度、后退10厘米……往往一推就推到天亮,这才感觉到腰部酸疼难忍。一个星期的推飞机实验,为比赛中成功完成任务奠定了坚实的基础。
THRONE飞行器上那个抓取U盘的精巧装置,也是临近比赛时大家“头脑风暴”的结晶。操作手李修在去年的设计基础上改进了机械吊臂的设计,之后又设计了一个悬挂磁铁并利用下视摄像头的装置,但机械臂过硬,而线又过软,效果并不理想。最后,大家把目光落在了平时经常随手摆弄的小工具——尼龙扎带上。在王玉旺的创意基础上,队员们花了一天的时间进行详尽的改进实验,发现很多问题并最终确定了扎带软爪的磁铁数量、长度、悬挂位置,以及飞机在盒子上方定位位置、旋转圈数等一系列参数。之后的每次实验,飞机十有八九都能吸到U盘,这才造就了比赛中似乎“信手拈来”的效果。
两个月的时间里,有苦也有乐。他们每个人都做过摔飞机的噩梦,也曾一起为把飞机总重量控制在比赛要求的1500克以内,赛前最后一晚疯狂地扒胶带、卸外壳、换螺丝。眼看飞机越来越“本色”也越来越轻盈,伴随着汗水涌出的,还有浓浓的成就感。
8月3日下午,当凝聚了他们无数心血的小小四旋翼飞机从“安全机构”里带着U盘轻巧飞出时,队员们把李一鹏高高抛到了空中。那一刻,这个永远在早上负责叫醒队员、从来也没有人看到他什么时候入睡的粗犷的东北小伙儿感到了心中说不出的酸甜苦辣。
展望 为无人机装上高科技的“智慧之眼”
谈到比赛带来的收获,王玉旺和施泽南有一个共同感受,就是终于真正理解了“自动化”这个专业的含义。它不仅仅是自动控制,也不是同学间打趣时说的“比电子软一点,比计算机硬一点”。为了这次比赛,他们分工合作,完成了底层通信、未知环境自主建模与定位、路径规划和飞行器控制等软件模块,亲手加装改造一些硬件设备,把一架“裸机”改造成“慎思层制定策略、算法层实现策略、控制层贯彻策略”的智能飞行系统,收获的不仅是成就感,更是对这整个体系的深刻理解与融会贯通。
成绩并没有蒙蔽队员们的双眼,他们清醒地认识到,对实际应用而言,这架飞机还是太简单了。未来的研究工作中,他们希望能进一步解决基础核心问题,实现真正的三维环境重建和更智能的目标识别。
戴琼海曾经在课堂上提出一个设想:“能不能有这么一架无人机,从7楼实验室穿过人群和楼梯等各种障碍物,为在4楼上课的我端来一杯水?”这个对人类来说轻而易举的任务,要想由空中机器人来完成,需要做的事还很多。
一个以视觉研究为主的实验室,为什么对无人机的课题这么感兴趣?李一鹏介绍说,戴琼海领导的宽带网数字媒体实验室在立体视觉、计算视觉等方面拥有雄厚的理论积淀,无人机视觉导航则是这些理论成果的重要应用方向之一。“现在无人机研究的前沿方向不再是底层的飞行控制系统,而是上层的传感器载荷。丰富的传感器及精准的处理算法就是无人机的高科技‘眼睛’。有了这双‘智慧之眼’,无人机才能真正成为一个智能飞行系统,在未来的国民经济建设中发挥不可替代的作用。”
比赛已经结束,而梦想终将升华。在未来的日子里,THRONE团队希望能设计出更加精巧复杂的智能飞行系统和集群,具备室外自然环境自主定位与导航功能,并能够实时重建大型建筑物的三维模型。“目前,国际上相关领域最出色的高校也只能做到离线建模。若能实现广阔自然场景中的自主环境感知和实时三维建模,那将是非常前沿的科技成果。”对这样的前景,李一鹏充满信心。
来源:新williamhill 2013-08-30











